
Rube Goldberg Laundry List
Description as a Tweet:
Normal lists are boring; when you finish something all you get to do is cross it off. This list is not boring. When you complete a task, you get to experience the catharsis of watching the paper with the task on it get annihilated by automated scissors.
Inspiration:
A lot of the time, like many others, I find it difficult to motivate myself to complete tasks. I think that if the reward for completing a task was more satisfying than just crossing it out, it would provide greater motivation to complete that task.
What it does:
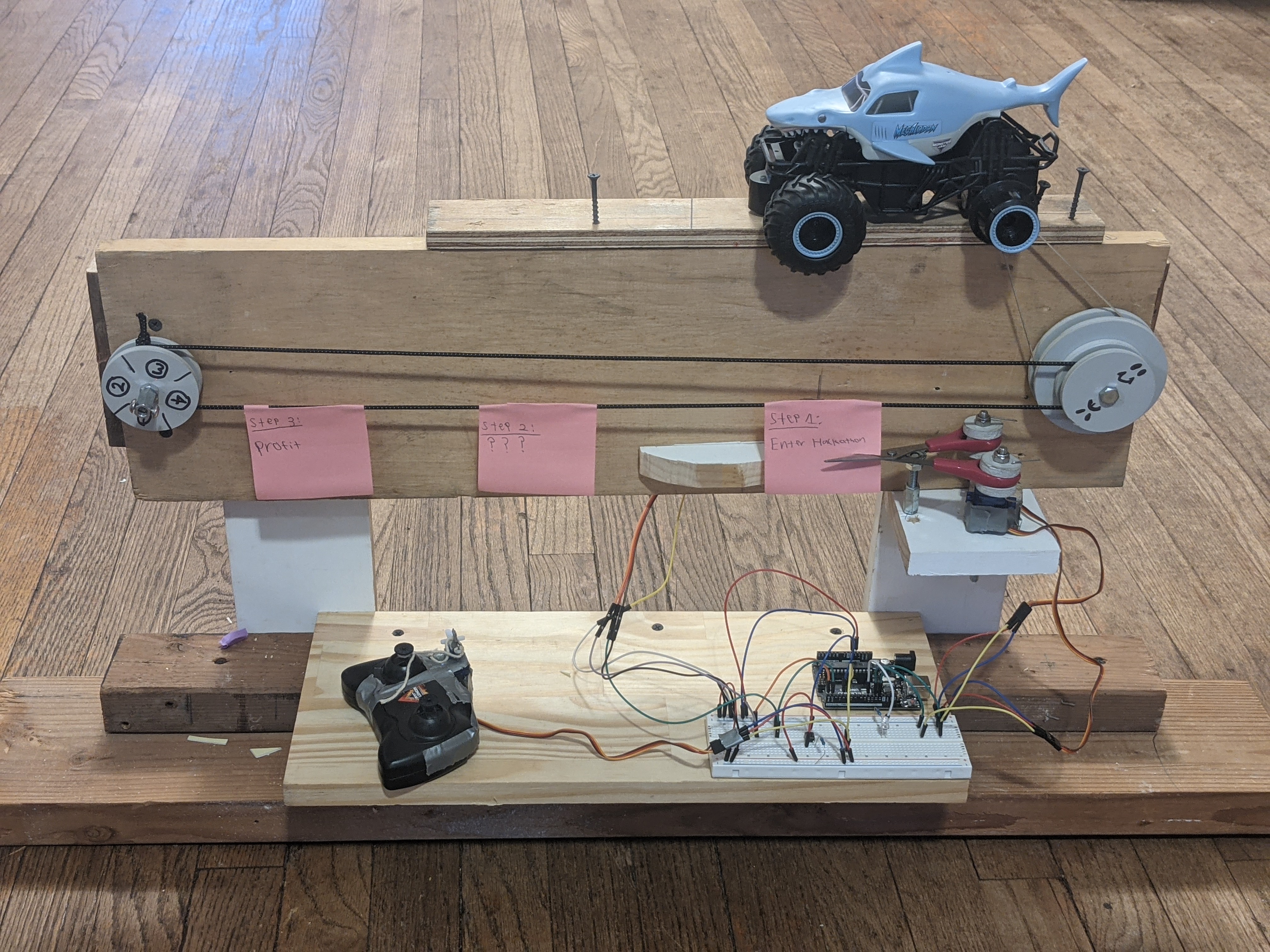
This project is a system of managing todo items. Each item that must be completed is on a pulley, placed in order of when they will be completed. When a task is completed, the user presses a button which advances the clothesline-like pulley of tasks. As the first task on the line progresses, automated scissors activate and cut the paper in half. This gives a fun reward for completing an item off of a todo list.
How we built it:
First a simplified CAD model was created. In this model, the pulley was horizontal, but I eventually decided to make it vertical for easier and more stable construction.
Technologies we used:
- C/C++/C#
- Arduino
- Robotics
- Other Hardware
Challenges we ran into:
The original plan was to use a stepper motor to power the pulley system. This would have been good as a stepper motor would have allowed for precise movement. Instead, I found out that the stepper motor was not powerful enough to drive the pulley, or much of anything for that matter. In response, I went to the dollar store, and got a cheap RC car which drives the pulley. Initially, I wanted to directly wire either the controller to the Arduino to to control it electronically, but I do not have a soldering iron to rewire the circuitry with. Instead, I used a servo motor to press the button on the remote control that makes the car go forward. The original plan was also to utilize an ultrasonic sensor to automate the process completely, but that ended up developing issues. I ultimately decided that it would be better if the machine was "human operated" via holding down a button that would advance the pulley and then cut through the task. In theory, the scissor mechanism works well with paper that is just dangling, but in reality, the paper gets caught in the scissors rather than the scissors cutting through it. To fix this, I added weights to each paper to add some tension.
Accomplishments we're proud of:
My only real experience with Arduino prior to this has been a simple circuit that lit up some LEDs with a button, so I'm quite proud to have been able to learn on the fly how to use servos. In terms of the mechanical assembly itself, I'm proud of the 5 bar mechanism that actuates the scissors.
What we've learned:
I learned how to use the Arduino servo library. In learning this, I also learned how to quickly research and utilize unfamiliar tools.
What's next:
I think the next step with the most direct benefit is to find (or design) a more ideal pair of scissors for this design. The current scissors have too much space between the top and bottom, so without tension weights, the paper gets stuck. Also, I would like to get a more powerful stepper motor capable of driving the pulley directly instead of the RC car. While the RC car does fit the Rube Goldberg aesthetic, it is somewhat impractical for what I would like to eventually be an autonomous mechanism. On the subject of making the mechanism autonomous, I would like to finish a sensor implementation to make the functionality automatic. This would also require a stepper motor, as aforementioned. There is also a small bug in that it is difficult for the pulleys to bring large pieces of paper around the bend, so perhaps in a future version more pulverization is needed.
Built with:
Drill press, circular saw, hacksaw, various wood bits, a cheap RC car, assorted fasteners, rubber bands, an elastic band, foam core, Arduino, duct tape, the essence of chaos
Prizes we're going for:
- Best Beginner Hardware Hack
- Best Documentation
- Funniest Hack
Prizes Won
Team Members
Matt Silverman